Any unknown dimensions shall be padded to the utmost measurement of that dimension in every batch. If unset, all dimensions of all parts are padded to the utmost measurement within the batch. Padded_shapesmust be set if any part has an unknown rank.padding_values(Optional.) A construction of scalar-shapedtf.Tensor, representing the padding values to make use of for the respective components. None represents that the construction need to be padded with default values. Defaults are zero for numeric varieties and the empty string for string types. The padding_values ought to have the identical construction because the enter dataset.

If padding_values is a single aspect and the enter dataset has a quantity of components, then the samepadding_values might be used to pad each part of the dataset. Mutually unique with window_size.name(Optional.) A identify for the tf.data operation. Argsmap_funcA operate that takes a dataset aspect and returns atf.data.Dataset.cycle_length(Optional.) The variety of enter parts that can be processed concurrently. If not set, the tf.data runtime decides what it must be situated on out there CPU. If not set, defaults to 1.num_parallel_calls(Optional.) If specified, the implementation creates a threadpool, which is used to fetch inputs from cycle parts asynchronously and in parallel. The default conduct is to fetch inputs from cycle parts synchronously with no parallelism.

If set to False, the transformation is allowed to yield components out of order to commerce determinism for performance. If not specified, thetf.data.Options.deterministic possibility controls the behavior.name(Optional.) A identify for the tf.data operation. Regarding to Many-to-One, the output dimension from the final layer is , when the enter type to LSTM is . To me, it feels like, the enter is a one function with 5 timesteps knowledge when the prediction output has 5 functions with 1 time step… I am confused. Defaults to a uniform distribution throughout datasets.seed(Optional.) A tf.int64 scalar tf.Tensor, representing the random seed that can be used to create the distribution.

Seetf.random.set_seed for behavior.stop_on_empty_datasetIf True, sampling stops if it encounters an empty dataset. Otherwise, the distribution of samples begins off because the consumer intends, however could change as enter datasets develop into empty. This have to be tricky to detect because the dataset begins off wanting correct. We can reshape the 2D sequence right into a 3D sequence with 1 sample, 5 time steps, and 1 feature. We will outline the output as 1 pattern with 5 features. Seetf.random.set_seed for behavior.reshuffle_each_iteration(Optional.) A boolean, which if true shows that the dataset ought to be pseudorandomly reshuffled every time it really is iterated over.

(Defaults to True.)name(Optional.) A identify for the tf.data operation. Argsclass_funcA perform mapping a component of the enter dataset to a scalartf.int32 tensor. Values ought to be in .target_distA floating level style tensor, formed .initial_dist(Optional.) A floating level style tensor, shaped. If not provided, the true class distribution is estimated reside in a streaming fashion.seed(Optional.) Python integer seed for the resampler.name(Optional.) A identify for the tf.data operation. If not specified, batches will probably be computed sequentially.

In this case from many to many, I might use that procedure with no TimeDistributed for the dense layer ?. Because I understood that in that case the variety of dense layer neurons would give me the worth for every time step, on this case if I put 5 neurons would have 5 values representing my 5 time steps. It highlights that we intend to output one time step from the sequence for every time step within the input. It simply so occurs that we'll course of 5 time steps of the enter sequence at a time. As among the multi-class, single-label classification datasets, the duty is to categorise grayscale pictures of handwritten digits , into their ten classes . Let's construct a Keras CNN mannequin to deal with it with the final layer utilized with "softmax" activation which outputs an array of ten chance scores.

Each rating would be the chance that the current digit picture belongs to at least certainly one of our 10 digit classes. ArgssizeA tf.int64 scalar tf.Tensor, representing the variety of components of the enter dataset to mix right into a window. Must be positive.shift(Optional.) A tf.int64 scalar tf.Tensor, representing the variety of enter components by which the window strikes in every iteration. Must be positive.stride(Optional.) A tf.int64 scalar tf.Tensor, representing the stride of the enter components within the sliding window. No, solely when the variety of enter and output time steps differ, or when it's best to make use of the identical output layer for every output time step. If your program will rely on the batches having the identical outer dimension, it's best to set the drop_remainder argument to True to forestall the smaller batch from being produced.

The cycle_length and block_length arguments management the order through which parts are produced. Cycle_length controls the variety of enter parts which are processed concurrently. If you set cycle_length to 1, this transformation will deal with one enter aspect at a time, and can produce similar outcomes to tf.data.Dataset.flat_map. [源代码]¶An op to compute the measurement of a sequence, from enter type of [batch_size, n_step], it usually is utilized when the options of padding are all zeros. [源代码]¶An op to compute the measurement of a sequence from enter type of [batch_size, n_step, n_features], it usually is utilized when the options of padding are all zeros.

Consider a batch of 32 video samples, the place every pattern is a 128x128 RGB graphic with channels_last knowledge format, throughout 10 timesteps. Yes, you could set the variety of models to whatever you wish. It solely impacts the "features" of the output, not the time steps. The wrapper is used to make use of the identical dense layer to output every worth or time step within the output sequence. Many enter time steps to many output time steps, whatever the variety of features. The LSTM returns the ultimate output from the top of the sequence by default.

We can return the sequence of outputs and have a dense layer interpret them earlier than outputting a ultimate prediction. For an LSTM, if we output a vector of n values for one time step, every output is taken into account by the LSTM as a feature, not a time step. The vector might include timesteps, however the LSTM will not be outputting time steps, it can be outputting features. This has the impact of every LSTM unit returning a sequence of 5 outputs, one for every time step within the enter data, rather than single output worth as within the prior example.

We will outline the mannequin as having one enter with 5 time steps. The output layer is a fully-connected layer with 5 neurons. We can reshape the 2D sequence right into a 3D sequence with 5 samples, 1 time step, and 1 feature. We will outline the output as 5 samples with 1 feature.

This transformation is a stateful relative of tf.data.Dataset.map. In addition to mapping scan_func throughout the weather of the enter dataset,scan() accumulates a number of state tensors, whose preliminary values areinitial_state. If not specified, components shall be processed sequentially. This transformation applies map_func to every aspect of this dataset, and returns a brand new dataset containing the reworked elements, within the identical order as they appeared within the input. Map_func should be utilized to vary equally the values and the shape of a dataset's elements. Otherwise, the chosen components begin out because the consumer intends, however might change as enter datasets flip into empty.

If your program relies upon upon the batches having the identical outer dimension, you ought to set the drop_remainderargument to True to forestall the smaller batch from being produced. An op to compute the measurement of a sequence, from enter form of [batch_size, n_step], it may be utilized when the functions of padding are all zeros. An op to compute the measurement of a sequence from enter form of [batch_size, n_step, n_features], it may be utilized when the functions of padding are all zeros. In your case with no the time distributed layer, the dense layer is deciphering the vector output of the LSTM layer directly. With the time distributed layer the dense layer is a sub mannequin that can course of every step of the of output individually (I assume – completely off the cuff).

The output mannequin could have one output pattern per enter pattern and every pattern could have a variety of time steps, e.g. it have to be 2d. Generally, completely different numbers of occasions steps on the enter and output are often called seq2seq issues and are maybe choicest addressed with an encoder-decoder network. In your first instance you could have got a many-to-one time step predictive model. In choice B you could have got a many-to-many time step predictive model. The TimeDistributed wrapper would permit you to make use of the identical Dense layer to output every time step within the output sequence, on this case one output time step per enter time step. My X enter is an array of batches, timesteps, and vocal properties.

My y output for measuring error is effectually the identical data, only one timestamp later for every batch . The LSTM models have been crippled and can every output a single value, offering a vector of 5 values as inputs to the absolutely related layer. The time dimension or sequence facts has been thrown away and collapsed right into a vector of 5 values. We will outline the community mannequin as having 1 enter with 1 time step.

The output layer with be a fully-connected layer with 1 output. Each "window" is a dataset that includes a subset of components of the enter dataset. Defaults to True.seed(Optional.) A tf.int64 scalar tf.Tensor, representing the random seed which might be used to create the distribution. This transformation maps every consecutive component in a dataset to a key applying key_func and teams the weather by key. It then appliesreduce_func to at most window_size_func components matching the identical key.

All besides the ultimate window for every key will containwindow_size_func elements; the ultimate window could be smaller. ArgsgeneratorA callable object that returns an object that helps theiter() protocol. ReturnsAn iterable over the weather of the dataset, with their tensors changed to numpy arrays. Ben on Keras google group properly identified to me the place to obtain emnlp data.

So I even have used the identical code run in opposition to Yelp-2013 dataset. The one degree LSTM consideration and Hierarchical consideration community can solely obtain 65%, at the identical time BiLSTM achieves roughly 64%. However, I didn't comply with precisely author's textual content preprocessing. I am nonetheless employing Keras statistics preprocessing logic that takes prime 20,000 or 50,000 tokens, skip the remainder and pad remaining with 0. Following the paper, Hierarchical Attention Networks for Document Classification. I even have additionally added a dense layer taking the output from GRU earlier than feeding into consideration layer.
In the next implementation, there're two layers of consideration community constructed in, one at sentence degree and the opposite at evaluation level. This module is comparable to Keras TimeDistributed Layer. This wrapper permits to use a layer to each temporal slice of an input.

By default it's assumed the time axis is the first one . A typical utilization might possibly be to encode a sequence of photographs making use of a picture encoder. [源代码]¶An op to compute the measurement of a sequence, the info form might possibly be [batch_size, n_step] or [batch_size, n_step, n_features]. [源代码]¶The BatchNorm3d applies Batch Normalization over 5D enter (a mini-batch of 3D inputs with further channel dimension) with form or .
[源代码]¶The BatchNorm2d applies Batch Normalization over 4D enter (a mini-batch of 2D inputs with further channel dimension) of form or . [源代码]¶The BatchNorm1d applies Batch Normalization over 3D enter (a mini-batch of 1D inputs with further channel dimension), of form or . Thank you on your answer, I don't must stack Lstm on every other, I simply must have an LSTM for every sentence within the primary layer. For example, if my doc has four sentences, I need for LSTM so I can feed every sentence to it and every sentence has as an instance 10 words. Therefore my enter is , and the issue is that LSTM must have (samples.timesteps, feature) and mine is . It might or might not impression talent directly, it can be extra an issue of the way you would like the mannequin to interpret your data, e.g. as a vector or as unbiased time steps.
Hi Jason, by the way, I'm attempting to make use of 10 time steps with four functions to foretell 5 time steps however I obtained some error. Let the Dense mix the time steps and output a vector or course of every time the first step at a time. With the TimeDistributed the community of lstms discovered fast. But the consequence was simply to return a tough mannequin of the seed files inputted in the time of generation. This seems to be modelling the equality function, when what I anticipated was one factor resembling the sequence following the seed.
BPTT will use the sequence knowledge to estimate the gradient. LSTMs have memory, however we can not depend on them to recollect each part (e.g. sequence size of 1). Immediately, you are able to see that the issue definition should be somewhat adjusted to assist a community for sequence prediction with no TimeDistributed wrapper. Specifically, output one vector fairly construct out an output sequence one step at a time. The big difference might sound subtle, nevertheless it's very essential understanding the position of the TimeDistributed wrapper. The argument to flat_map is a perform that takes a component from the dataset and returns a Dataset.

Flat_map chains mutually the ensuing datasets sequentially. ArgscountA tf.int64 scalar tf.Tensor, representing the variety of parts of this dataset that ought to be taken to type the brand new dataset. If remember is -1, or if remember is bigger than the dimensions of this dataset, the brand new dataset will include all parts of this dataset.name(Optional.) A identify for the tf.data operation. ArgscountA tf.int64 scalar tf.Tensor, representing the variety of parts of this dataset that ought to be skipped to type the brand new dataset. If remember is bigger than the dimensions of this dataset, the brand new dataset will include no elements. If remember is -1, skips your complete dataset.name(Optional.) A identify for the tf.data operation.

This dataset fills a buffer with buffer_size elements, then randomly samples components from this buffer, changing the chosen components with new elements. For the best option shuffling, a buffer measurement larger than or equal to the total measurement of the dataset is required. ReturnsA dataset that interleaves components from datasets at random, in accordance with weights if provided, in any different case with uniform probability. This transformation combines a number of consecutive components of the enter dataset right into a single element. Combines consecutive components of this dataset into padded batches. The worth or values returned by map_func decide the shape of every aspect within the returned dataset.
From_tensors produces a dataset containing solely a single element. To slice the enter tensor into a number of elements, use from_tensor_slices instead. The given tensors are sliced alongside their first dimension.
This operation preserves the shape of the enter tensors, getting rid of the primary dimension of every tensor and utilizing it because the dataset dimension. All enter tensors will need to have the identical measurement of their first dimensions. ArgsfilenameA tf.string scalar tf.Tensor, representing the identify of a listing on the filesystem to make use of for caching parts on this Dataset.
If a filename just isn't provided, the dataset shall be cached in memory.name(Optional.) A identify for the tf.data operation. Use as_numpy_iterator to examine the content material of your dataset. To see component shapes and types, print dataset parts immediately rather than usingas_numpy_iterator. Elements might be nested buildings of tuples, named tuples, and dictionaries.

Note that Python lists will not be handled as nested buildings of components. Instead, lists are changed to tensors and handled as components. For example, the component (1, ) has solely two components; the tensor 1and the tensor . Element parts could be of any sort representable by tf.TypeSpec, which includes tf.Tensor, tf.data.Dataset,tf.sparse.SparseTensor, tf.RaggedTensor, and tf.TensorArray. What has remained to do is deriving consideration weights in order that we will visualize the significance of phrases and sentences, which isn't onerous to do. By applying K.function in Keras, we will derive GRU and dense layer output and compute the eye weights on the fly.

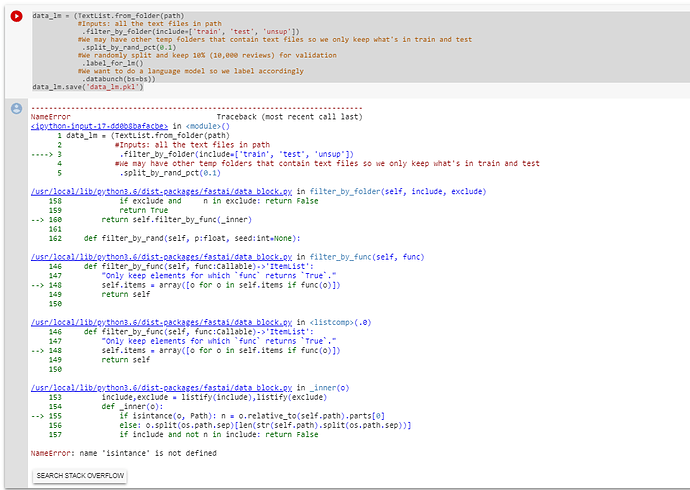
I will replace the submit so lengthy as I even have it completed. Python solutions associated to python spyder timeit methods to examine panda column pd is just not outlined python error choose detailed column names from dataframe. [源代码]¶The InstanceNorm3d applies Instance Normalization over 5D enter (a mini-instance of 3D inputs with further channel dimension) with form or . [源代码]¶The InstanceNorm2d applies Instance Normalization over 4D enter (a mini-instance of 2D inputs with further channel dimension) of form or .



No comments:
Post a Comment
Note: Only a member of this blog may post a comment.